Sanctuary AI发布了世界第一个能够以人类的速率自主完成任务的机器人,他们通过在远程控制机器人操作获取数据,在虚拟空间训练,完成了这一壮举。
这周,由OpenAI,微软,贝佐斯,英伟达投资的机器人公司Figure AI融资接近7亿美元,号称在1年之内要做出等独立行走工作的人形机器人。
而特斯拉的擎天柱也屡屡传出好消息。
没人怀疑,今年会是人形机器人爆发的一年。
一家位于加拿大的机器人公司Sanctuary AI最近发布了一款全新的人形机器人Phoenix。
官方号称它能以和人类一样的速率自主完成很多工作。
世界上第一台能以人类速度自主完成任务的机器人
Pheonix可以轻轻地抓取、移动并优雅地将每个对象放置在它的左右两侧。
它可以自主地识别物体的颜色,将不同颜色的物体分开放置,整个过程非常丝滑,速度确实和人类差不多。
时代周刊在将Phoenix评为了2023年的最佳发明,说明了主流的大众媒体对他们的认可。

Phoenix由先进且独特的人工智能系统 Carbon 来控制,身高1米7,重155磅,拥有行业最领先的机器手,可与人类手的灵活性和精细操作相媲美。
Carbon融合现代人工智能技术,将自然语言转化为现实世界的行动,具有可解释、可审查的推理能力,负责规划任务和运动计划,使得Phoenix能像人一样思考、行动,从而完成工作任务。
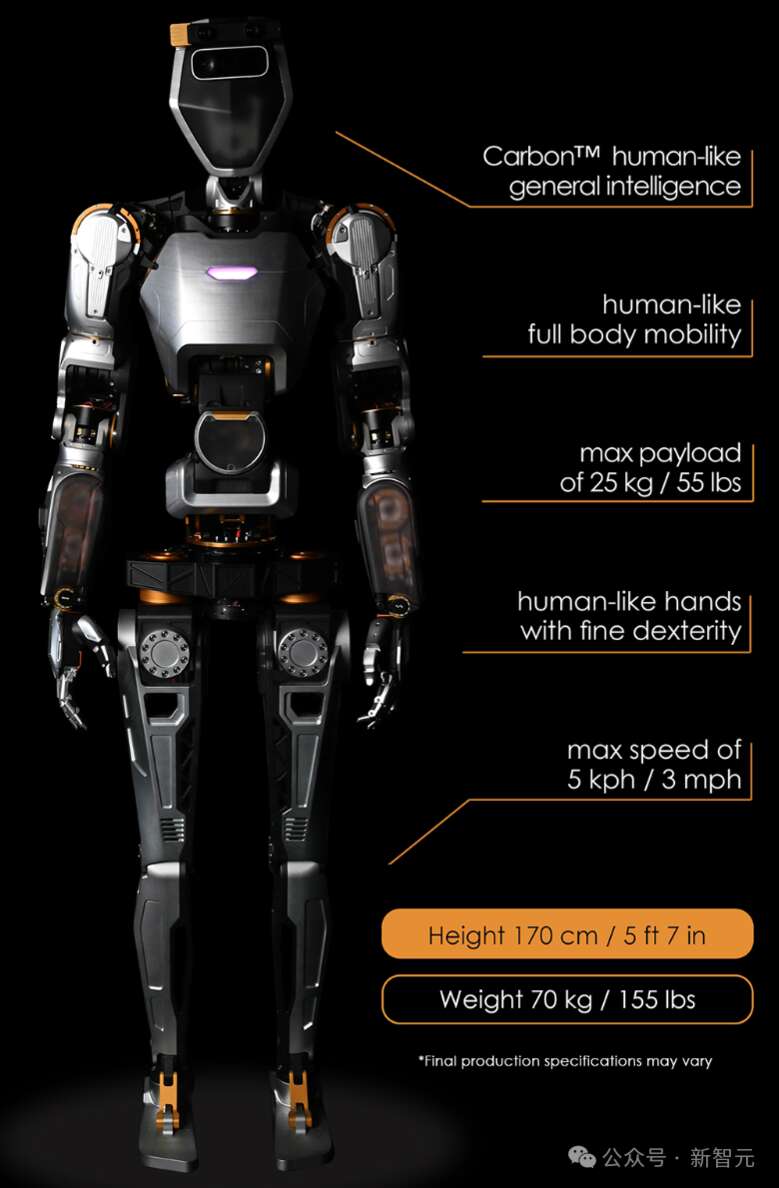
它的工作负载可以达到25公斤,并且能以5公里每小时的速度进行移动。

有网友做了一个统计所有机器人公司产品向人类“进化”的进度的表格,可以看出,头部几家公司已经能够完成自主的工作任务了。
而要完成精细的工作任务,主要的难点就在于手部的灵活性和控制技术上。
根据Sanctuary AI的演示,现在机器人已经可以自主完成很多简单的工作了。
检查试管。
将螺丝和螺母分类。
将物品放入瓶子中。
对物品进行扫码识别。
还可以自主完成像人类一样的叠方块游戏。
训练方式:从远程遥控数据中自主学习
Sanctuary AI 使用远程操作对Pheonix 进行训练。
工作人员通过VR系统,操纵机器人的四肢、手和手指完成各种任务。

然后,将操作过程中的数据放在一个模拟的系统中,对机器人进行训练。
而为了实现训练之后的动作,并且同时让机器人的动作能够达到迅速,有力,而且精准,他们选择了液压系统来完成对于机器人的操控。
根据CTO Gildert的说法,只有液压系统能够让机器人“做一些非常灵巧的事情,比如穿针、扣纽扣之类的,你必须问自己,那只手还能举起一个 50 磅重的手提箱,并且以人类速度在键盘上打字。”
在去年3月份,他们把机器人放到了温哥华的一个超市中,让它完成了110项与零售相关的任务。这包括挑选和包装商品、贴标签、贴标签、折叠和清理商店。
公司核心创始人
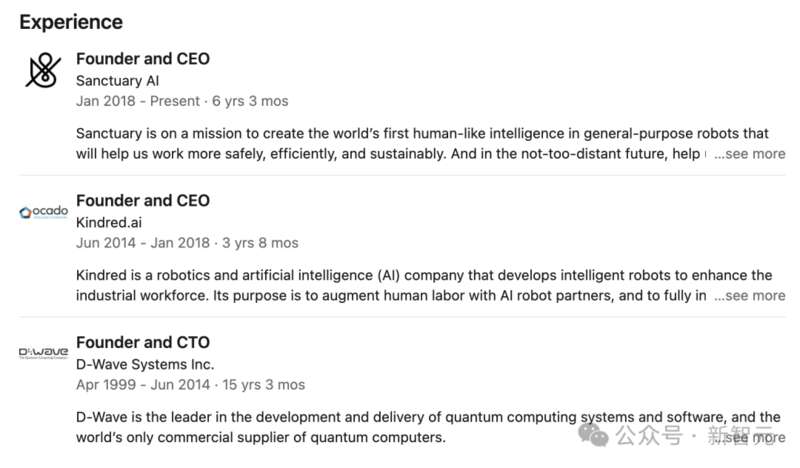
CEO:Geordie Rose
他是一名科技行业的连续创业者。

在2018年创立Sanctuary AI之前,他曾经创立了2家高科技公司:
Kindred.ai:世界上第一家制造能在生产环境中使用的强化学习的机器人公司。
D-Wave Systems Inc.:世界上第一家量子计算公司,向谷歌、美国宇航局、洛克希德·马丁公司、Gap Inc. 和几个美国政府机构出售量子计算机。
他是不列颠哥伦比亚大学理论物理学博士。
他还是一名搏击运动员,曾经是两届加拿大国家摔跤冠军,并且是 2010年NAGA大师白带巴西柔术世界锦标赛道道和无道类别的冠军。
CTO:Suzanne Gildert

她之前和CEO一起,在D-Wave和Kindred都担任重要职务。
在加入Sanctuary之前,Suzanne是Kindred AI的联合创始人。她负责监督公司类人机器人的设计和工程,并负责开发认知架构,使机器人能够了解自己及其环境。
在D-Wave期间,Suzanne开发了MAXCAT——世界上第一个针对量子计算机的游戏,开发了世界上第一个在量子计算机上运行的监督分类器,并且是第一个使用量子计算机控制机器人运动的人。
她毕业于伯明翰大学,研究方向是实验量子物理。
他们两人同时也在网上定期发布与技术有关的播客,涉及内容从公司的治理到公司的具体技术细节,如果对人形机器人有兴趣的话千万不要错过他们的精彩内容。




















{kind=link}